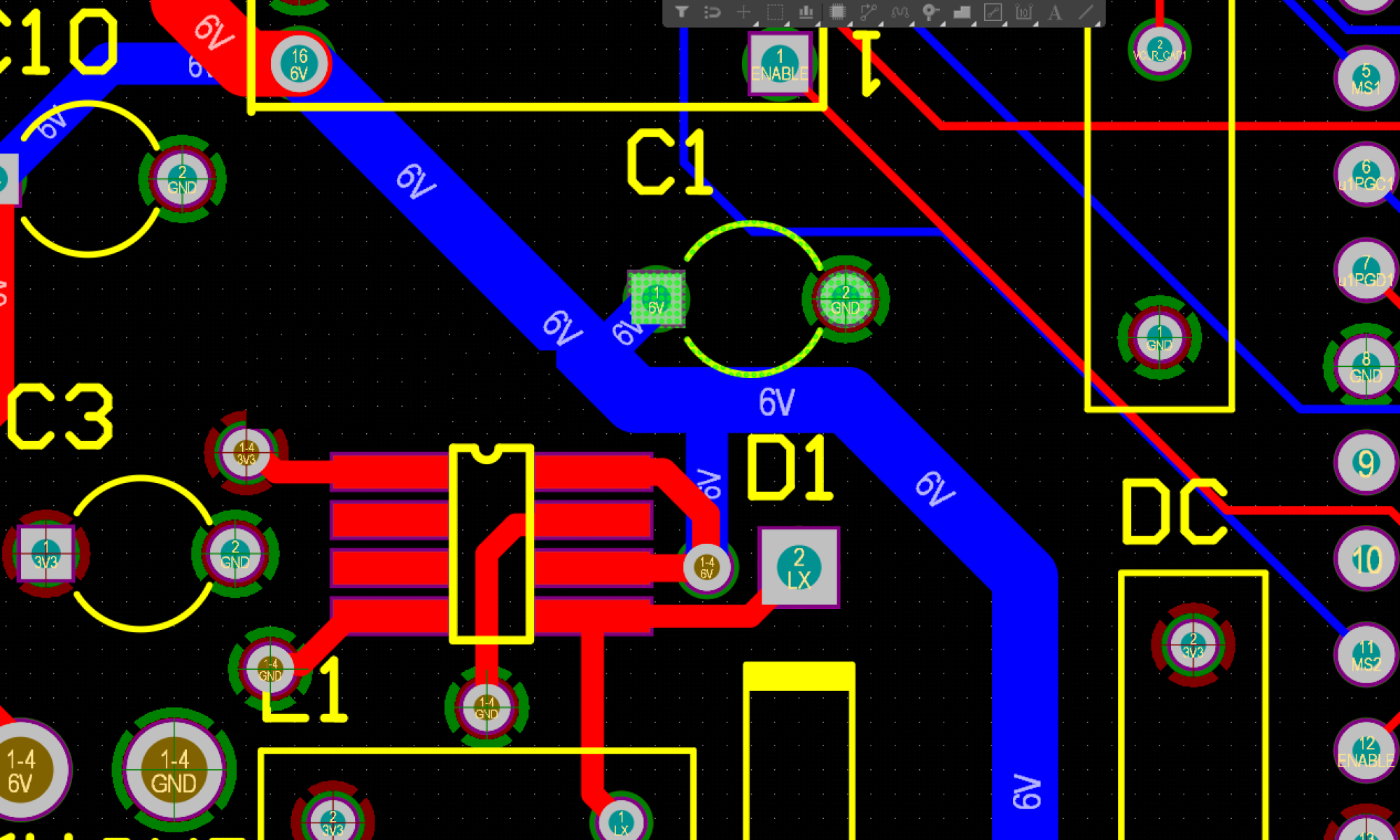
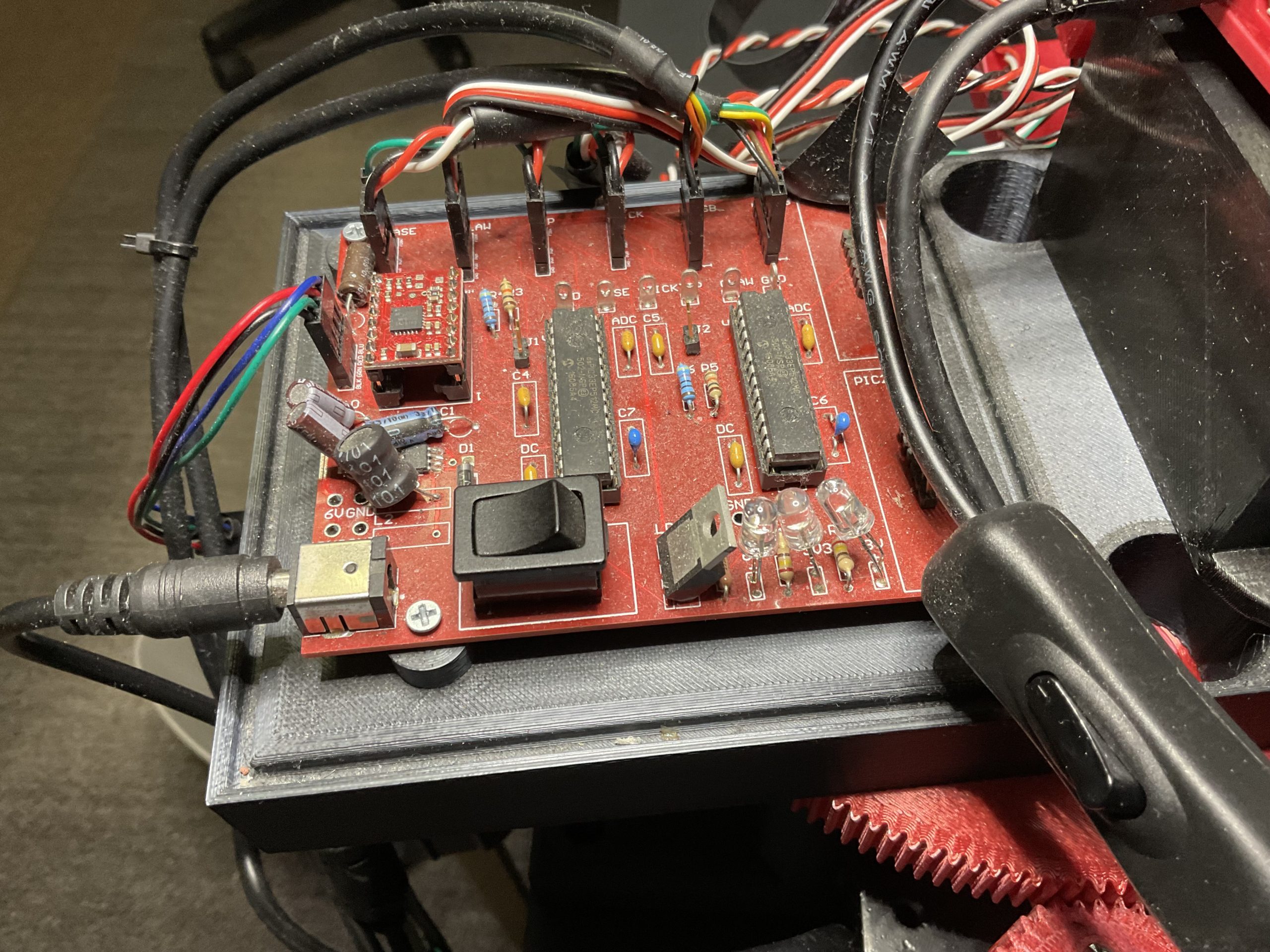
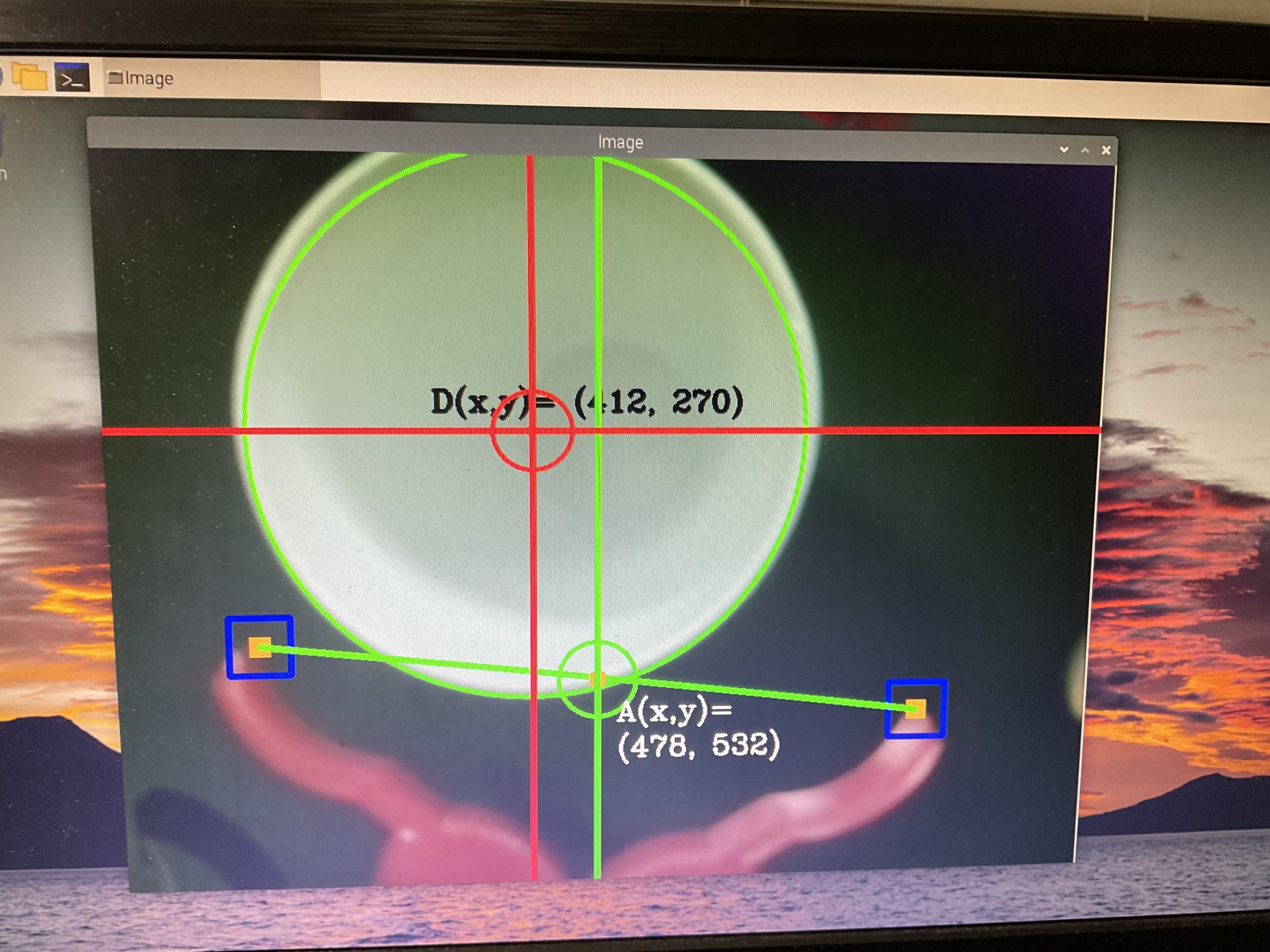
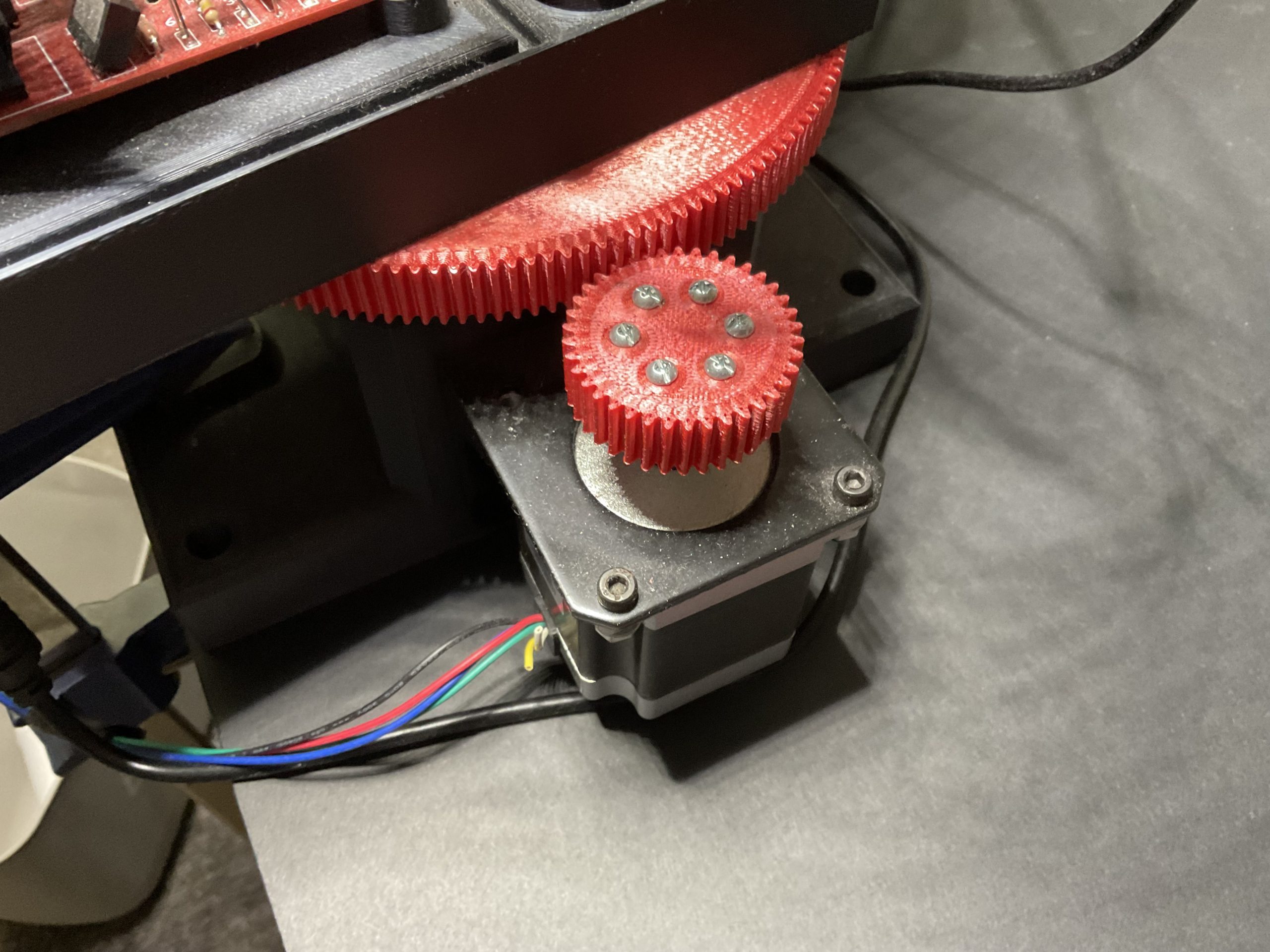
Visual servoing with a homemade robotic arm designed, engineered, and built by Erik Sarkinen. The arm finds the cup with a camera, so the arm operates automatically. The camera feed is shown on the monitor.Custom Android tablet application for initiating the visual servoing or controlling the robotic arm. The app communicates with the Raspberry Pi, the Linux computer on the robot, via Bluetooth.Custom printed circuit board I designed in Altium Designer and had printed overseas. Two dsPIC33E motor controller microcontrollers were used.Raspberry Pi camera stream. The white circle is the cup being grasped.Stepper motor for rotation and custom 3D printed gears I made.FEETECH servo motors I used. The green wire is potentiometer feedback giving the angle of the motor shaft.Raspberry PI (64-bit Linux mini-computer) used to control the arm and do the video processing.CAD model of the robotic arm. Every part was modeled and printed by me except the motors.Mechanical claw CAD model designed and 3D printed by me.