Skip to content
Engineered and Built by Erik Sarkinen
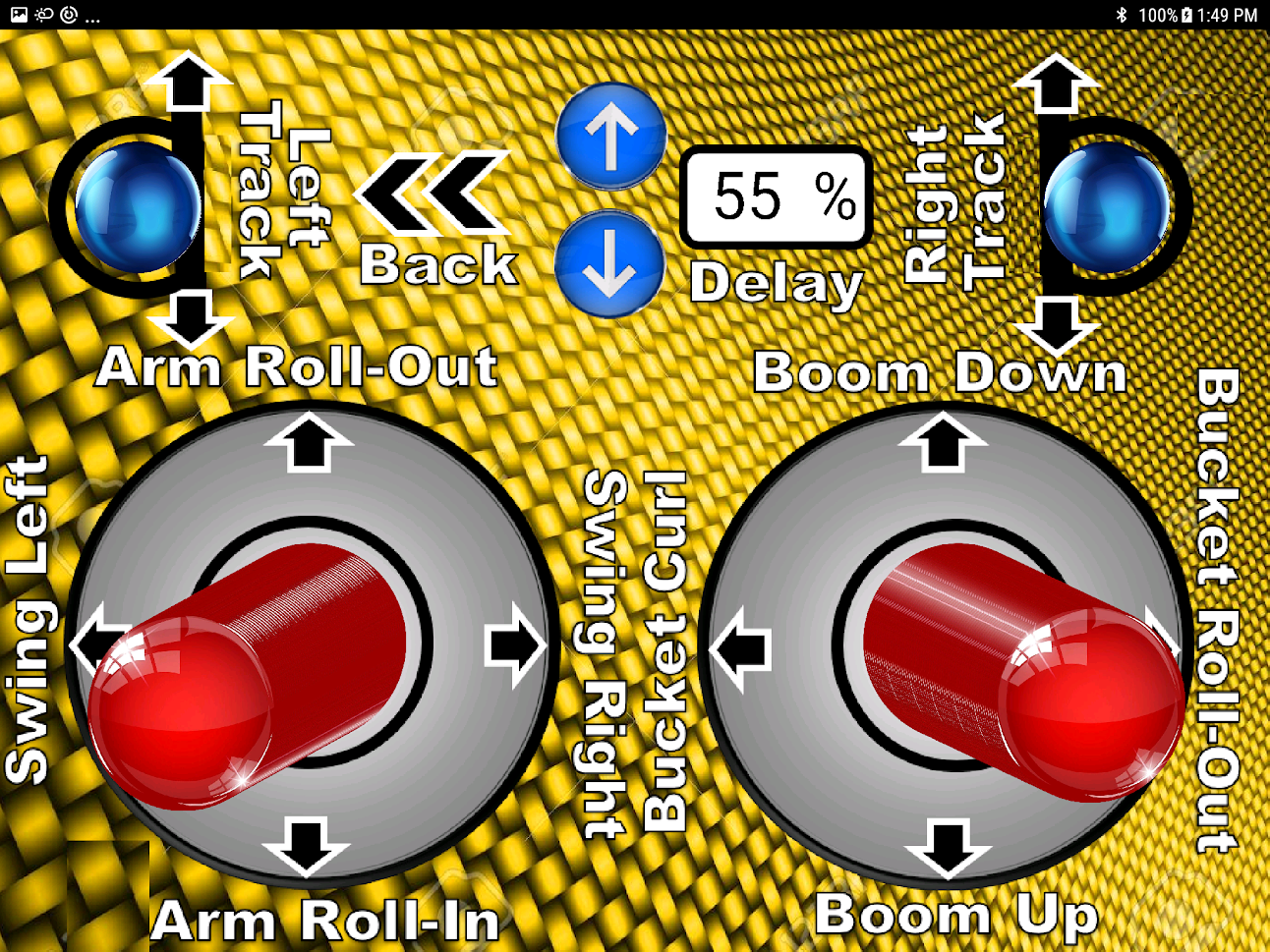 Android Application to Control the Remote-Control Excavator
Android Application to Control the Remote-Control Excavator
- The App connects to the top circuit board wirelessly via Bluetooth.
- The software controls twelve motor functions with four virtual joysticks.
- The software has programmable delay to adjust the responsiveness of the robotic arm.
 Servo Motor Circuit Board and Batteries. A Microchip dsPIC33 microcontroller and a Microchip BM78 Bluetooth module was used.
Servo Motor Circuit Board and Batteries. A Microchip dsPIC33 microcontroller and a Microchip BM78 Bluetooth module was used.
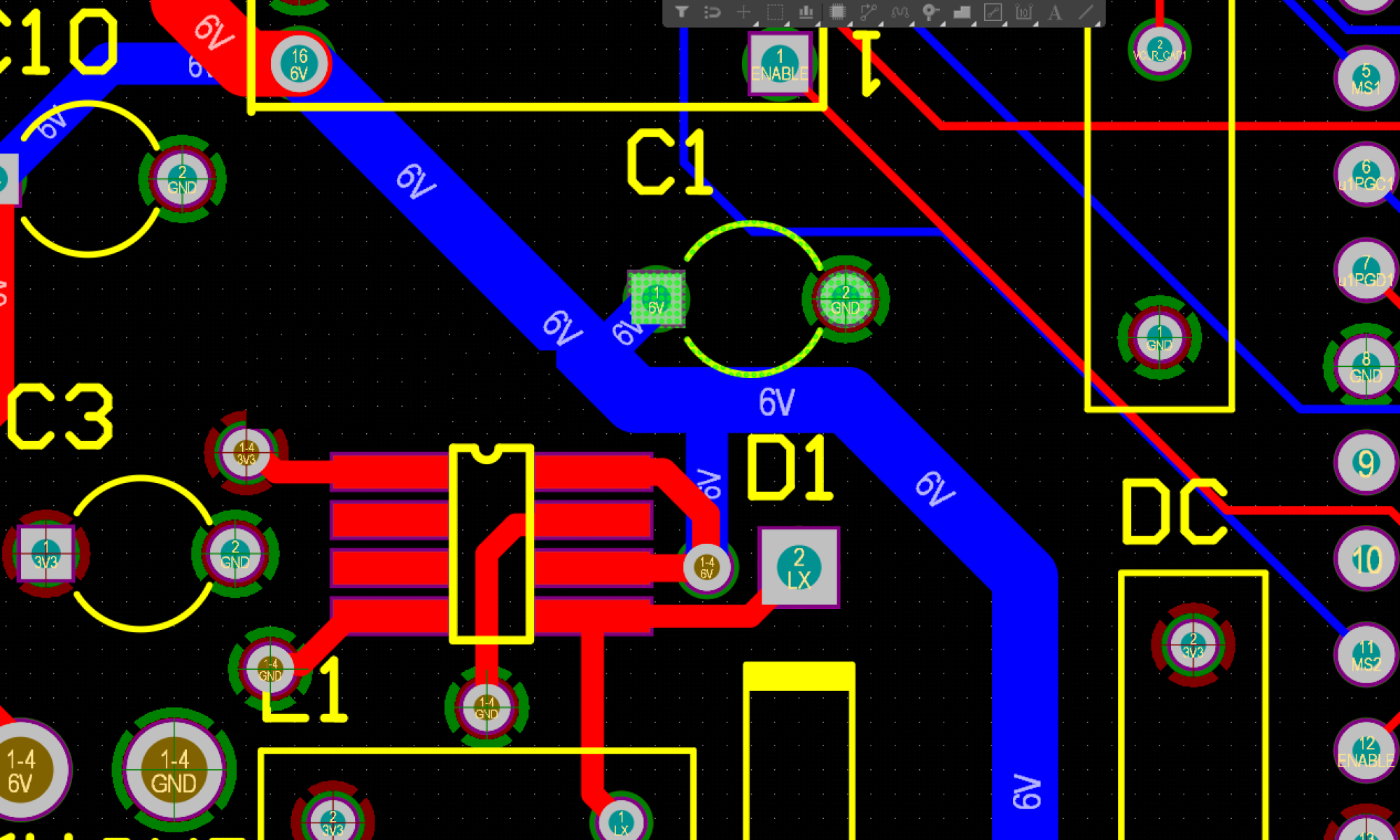
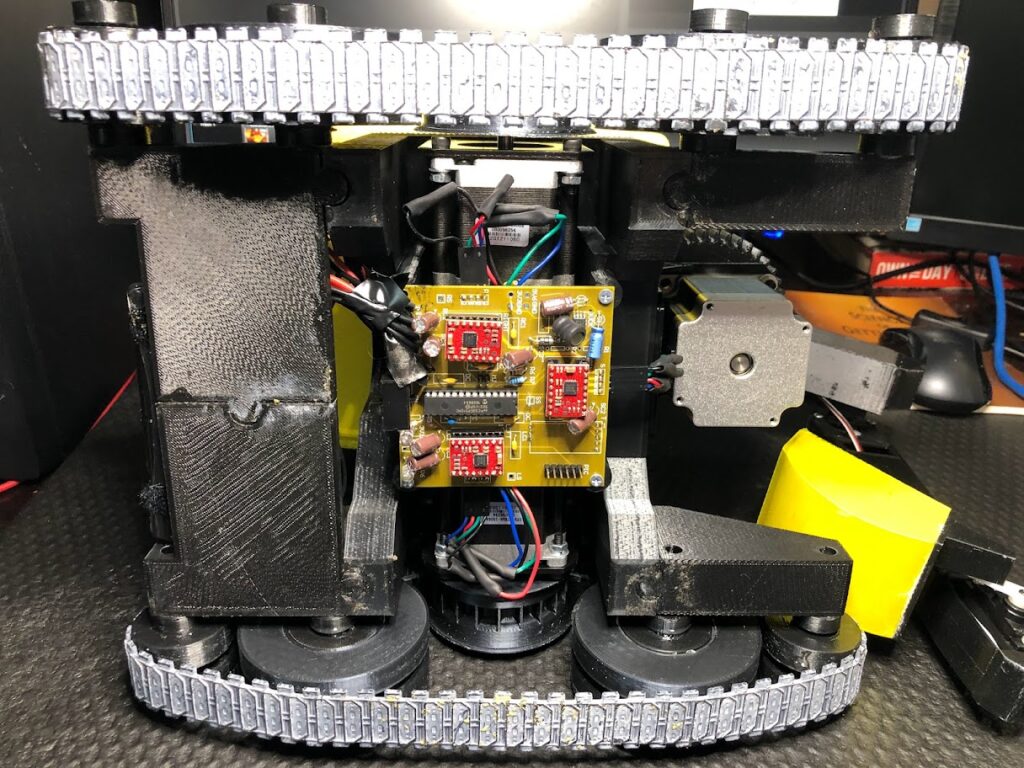 Stepper Motor Circuit Board. Two 433 MHz RF transceivers were used for inter-circuit board communication.
Stepper Motor Circuit Board. Two 433 MHz RF transceivers were used for inter-circuit board communication.
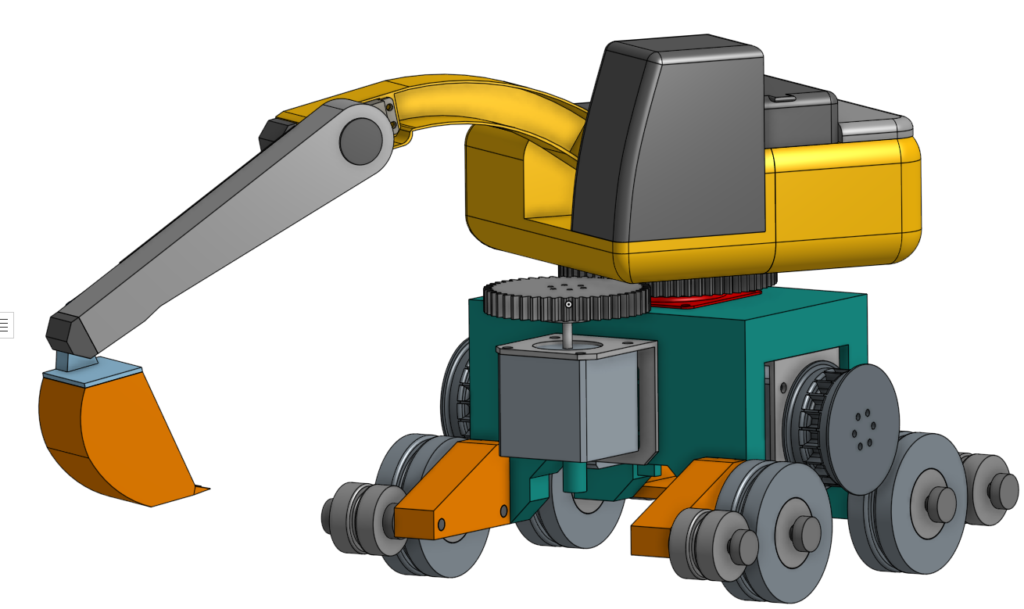 CAD Assembly
CAD Assembly
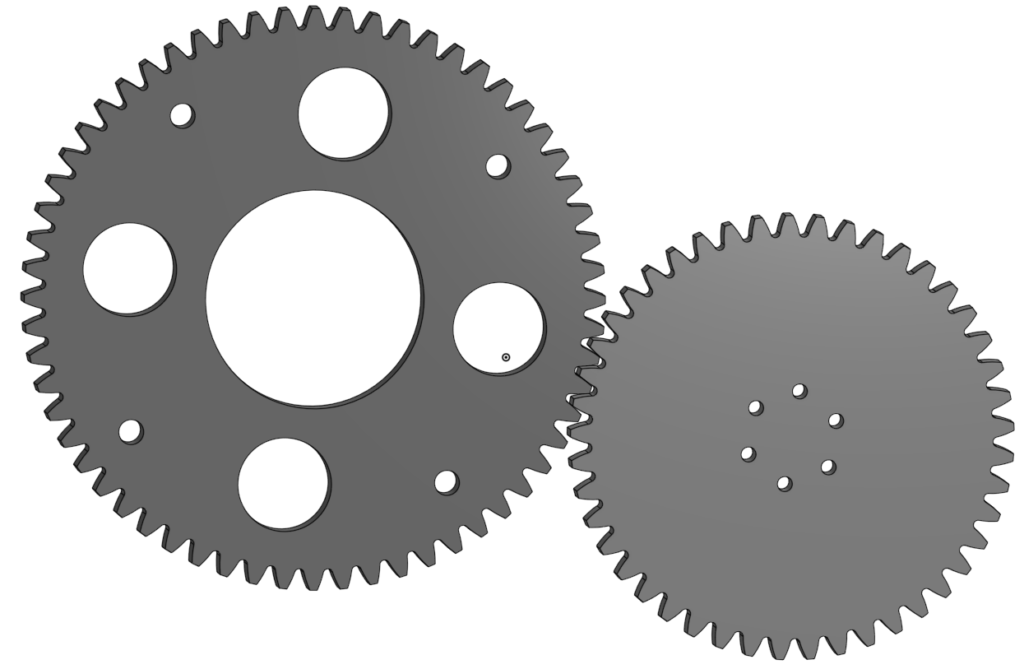 CAD Gear Design
CAD Gear Design
 Over 200 hours of print time on my 3D printer to print the excavator parts
Over 200 hours of print time on my 3D printer to print the excavator parts